SplatTalk: 3D VQA with Gaussian Splatting
Abstract
- Language-guided 3D scene understanding
- 3DGS token to LLM
- zero-shot 3D VQA with only posed images
Motivation
- 2D VQA는 잘하는데 3D VQA는 잘 못함.
- 3D VQA annotation이 비싸기 때문이다.
- 3D VQA는 2D 기반으로 풀면 안된다는 아이디어
- segmentation + image encoder로 풀 경우 3D location, 3D holistic understanding 질문 답변 못함
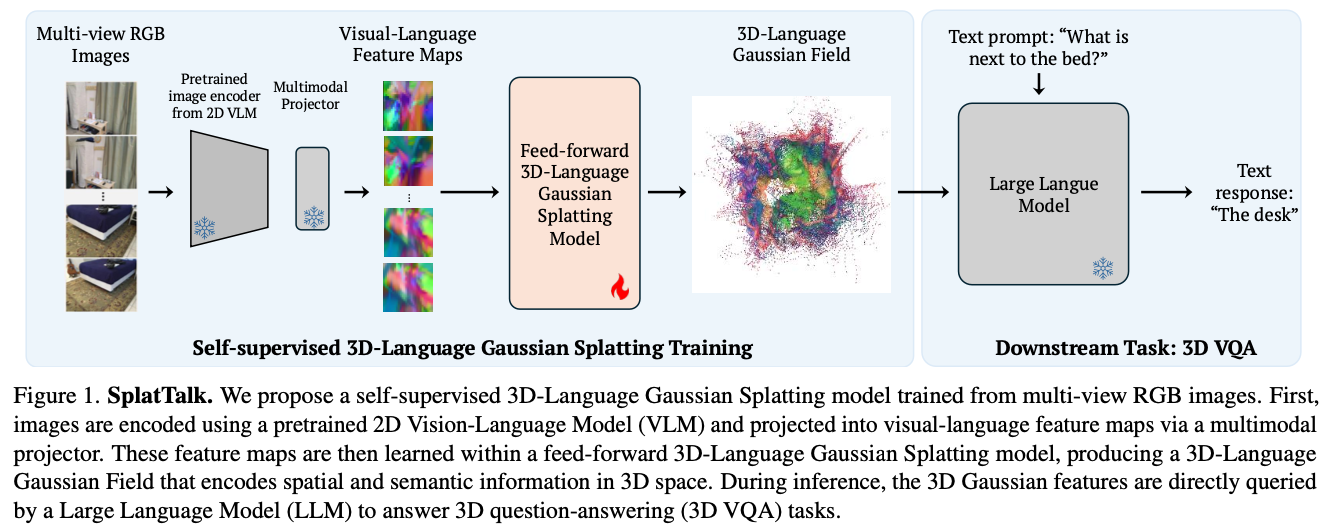
- SplatTalk 제안
- posed 2D RGB images 활용
- 3DGS 만들고 3D token 추출하여 LLM input으로 direct하게 사용 <-> ChatSplat1
Method
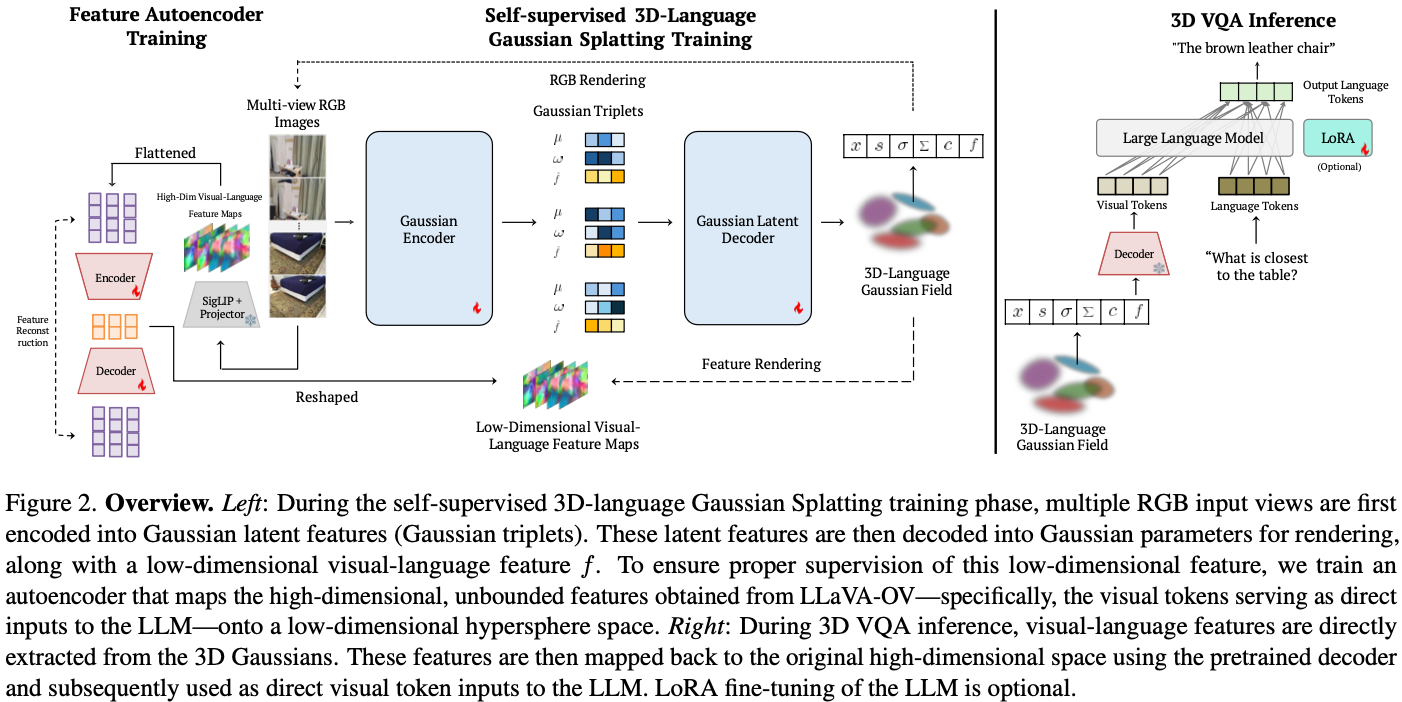
architecture는 다음과 같이 동작한다 (Fig. 2 참조).
- 각각의 RGB image는 Gaussian triplet으로 encode + low-dim encoder로 low-dim feature $f_{pseudogt}$를 얻는다.
- 다시 decode해서 3d Gaussian field + $f$를 만든다.
- 이 $f$를 $f_{pseudogt}$로 train한다.
이때 $f$는 LLM input으로 바로 활용되는 language aligned 3d feature이다.
flow는 다음과 같다:
- Training the feature autoencoder
- Self-supervised 3D-Language Gaussian Splatting Training
- 3D VQA Inference
Integrating Language Features
- Visual Tokens for 2D Pseudo Groundtruth Features
- 그냥 multimodal encoder 없이 image encoding하고 3DGS training하려면 projector retraining이 필요했다.
- 이는 아마도 image가 high-dimension이라 input variation에 sensitive해지는 것으로 파악
- Feature Dimensionality Reduction
- Joint-training RGB and Language
- previous work와 다르게 RGB Gaussian과 language feature module을 joint-training했다.
- 그렇게 했을 경우 holisitc한 scene information understanding에 그침.
- 따라서 Gaussian 쪽에 decoder head를 또 붙여서 semantic feature for each 3D Gaussian을 capture
Extracting 3d Language Features
- inference할 때에는 3D Gaussian의 mean position에서 language feature를 extract한다.
- the semantic feature $f$ derived from each Gaussian’s mean effectively captures the scene’s semantics
- 그래서 f에 대한 expectation을 구해서 f에 대해 L2 loss를 minimize한다.
- 이 식의 의미는 optimal 3D Gaussian feature $f^*$이 weighted sum of 2D feature map이 되는 것이다.
- segmentation literature에서는 Gaussian center에 대해서만 query하는 경우가 있다.
- 이는 segmentation에서는 each Gaussian이 distinct하기 때문이다.
- 그러나 3D reasoning에서는 individual Gaussian이 explicit object category를 encode하지 않을 수도 있기 때문에 위와 같은 방식으로 feature를 구한다.
Experiments
이쪽 domain의 performance metric을 잘 몰라서 패스
paper 참조하길 바란다.
Discussion
- 3D gaussian에 대해 language aligned encoder가 없어서 이렇게 하는 것 같다.
- 재밌는 방식이긴 한데 방법이 decent해보이지는 않는다.
References
Hanlin Chen, Fangyin Wei, and Gim Hee Lee. Chat-splat: 3d conversational gaussian splatting. arXiv preprint arXiv:2412.00734, 2024. ↩︎
Minghan Qin, Wanhua Li, Jiawei Zhou, Haoqian Wang, and Hanspeter Pfister. Langsplat: 3d language gaussian splatting. CVPR, 2024. ↩︎ ↩︎
Yanmin et al. Opengaussian: Towards point-level 3d gaussian-based open vocabulary understanding. NeurIPS, 2025. ↩︎